

*執筆途中だが公開ポリシーに則り公開。
2022.02.25
記事を通して言いたいこと(結論)
例によって、冒頭で述べておく。
- ロータ4つ形式のドローンの基礎的な運動モデルを作成した.機体のダイナミクスは この記事 にて作成した6自由度非線形剛体ダイナミクスコンポーネントを用いている.ロータについては,力とモーメントを生成し機体ダイナミクスコンポーネントに渡すシンプルなコンポーネントを作成した
ロータコンポーネントについての報告・紹介はまた別記事を作成予定.本記事ではあまり踏み込まない.
モデル化対象(とその周辺について)
- モデルのフルパス: AircraftDynamics.RigidBodyFDM.Examples.sampleAircrafts.Drone4rotor00_ex02
- githubのライブラリページリンク
- thrust level rotor 1
- thrust level rotor 2
- thrust level rotor 3
- thrust level rotor 4
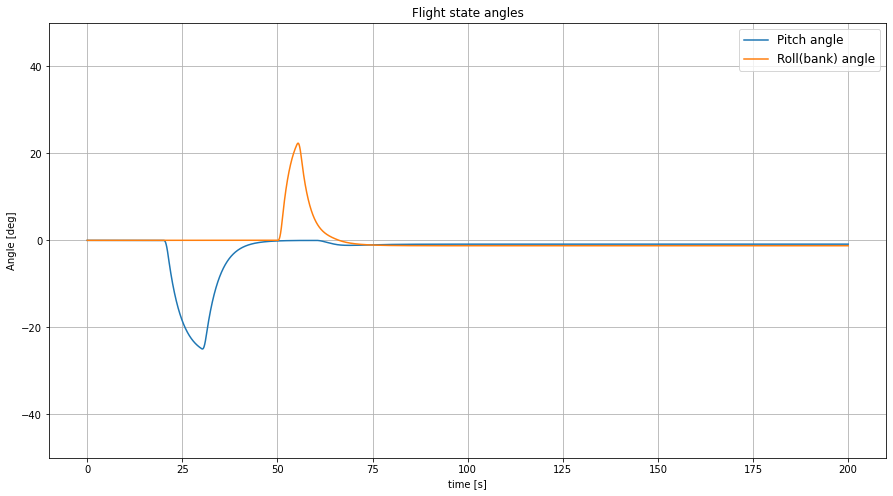
- flight state angles
- heading angle
- altitude
- planner trajectory
- 3D flight trajectory
- ロータ4つ形式のドローンの基礎的な運動モデルを作成した.機体のダイナミクスは この記事 にて作成した6自由度非線形剛体ダイナミクスコンポーネントを用いている.ロータについては,力とモーメントを生成し機体ダイナミクスコンポーネントに渡すシンプルなコンポーネントを作成した

シミュレーションモデル
Diagram

●シミュレーションモデル情報
シミュレーション実行
Input
下記の推力入力値は,機体重量にたいする割合.各ロータが0.25で水平姿勢の時,機体に働く重力と上向き推力が釣り合い,空中静止する,




動画
Variables




後書き・まとめ
例によって、冒頭文の繰り返し。
本記事で深く取り上げなかった,今回新規作成したロータコンポーネントについての報告・紹介はまた別記事を作成予定.
以上
コメント